The next major event in Curiosity’s journal would be the landing. The center of the action on Earth would be JPL, where the signals would be received from the deep-space network antennae.
In comparison with the launch, landing on Mars is statistically far more risky. The Atlas V that powered the Curiosity rover up and away from Earth had a better than 95 percent success rate. In contrast, there had only been a total of six successful landings on Mars out of the many attempts by the United States, the Soviet Union, and the European Space Agency—a rate of well under 50 percent. NASA had not had any failures with its three Mars landings in the past decade, but the risk of crashing was formidable, and much greater than NASA would like to admit.
Just after ChemCam’s 2007 cancellation, I added a new slide to the presentations I gave around the country. It showed the likelihood of success from the beginning of a hypothetical project like ChemCam to finally making measurements on another planet. Every project starts as a gleam in someone’s eye—an idea. Like a seed, an idea may stay dormant for a long time, waiting for the right season—the right environment—in which to germinate. There are thousands of ideas for planetary exploration floating around, but the likelihood of success for any one of these is extremely low. The idea has to get fleshed out, and that takes money. So the next point on my graph was winning an instrument development grant, usually from NASA for projects in the United States, but sometimes from other sources. With some money in the bank, a prototype can be built (as we built and tested precursor models before ChemCam) and the concept can be demonstrated. Still, although NASA awards new instrument grants every year, very few of them make it to flight.
At this point the line representing the chance of success has barely moved upward and still shows a likelihood of success of less than 10 percent. The instrument concept might win another round of development proposals, potentially upping the odds a little. The next big break requires getting selected for flight. With a promised ride into space, a concept now has something like a 30 percent chance of making it to a destination like Mars. My chart then shows a steadily climbing line as the project passes required milestones, the two biggies being the preliminary and critical design reviews. In the case of ChemCam I showed a huge and sudden dip back to near zero labeled “Cancellation!” Fortunately, we got past that hurdle and climbed back onto the ascending curve. After that comes the instrument’s delivery to the spacecraft. As the spacecraft is tested, the probability line rises steadily. At the point labeled “launch,” the line jumps up a bit. The launch itself carries a risk of approximately 5 percent.
The biggest single hurdle was yet to come for Curiosity. In my chart I showed the landing risk at between 20 and 25 percent. After that, the line is near the top, but not quite there yet. The last 5 percentage points were reserved for actually making the first measurement. It was possible that an instrument could make it to its destination and then not work. It had happened on a number of instruments.
All of the times I had shown this chart to date had been well prior to launch. The chart clearly showed the audience that we were not very close yet; the odds of not making it were still nearly one in two or one in three, depending on when I showed the slide. I would point out how far we had to go in our chances for success, and the listeners would become rather sober, perhaps thinking in the back of their minds that we were crazy to attempt such a daunting feat. Then I would quickly flip to the next slide to show the same line plotted on a logarithmic scale, indicating graphically that we now had orders of magnitude better odds than when the idea was first birthed. The new slide showed the current position comparatively near the top, and the audience would invariably laugh at my sleight of hand and my optimistic viewpoint. Yet, I knew that we still had a long way to climb up the curve to success.
Somehow I felt like I had been here before. In fact, I had—on Genesis. In that case, the rocket had launched with a fatally flawed spacecraft, and we never knew it until the crash in the Utah desert. How did we know that Curiosity wasn’t going all the way to Mars with some fatal flaw? Given the complexity of its landing sequence, a failure was much more likely for Curiosity than it had been for the simple Genesis capsule. And on Mars, there would be no one to pick up the pieces. We might never find out what went wrong.
I realized that my only landing experience—Genesis—had prejudiced me. I was a victim of my own uniquely disastrous experience. It is a strange quirk of our brains. They want to defy logic and rely only on our own experiences, especially if those experiences are painful. It’s irrational. Now I started to understand my skepticism about landing safely on Mars.
In my dreams, everything that could go wrong played itself out at least once. Starting from the top of the list, the capsule could miss the planet. Or it could come in too hard, like the Mars Climate Orbiter had in 1998. Then, too, this would be the first guided entry at the Red Planet. In all the previous Mars landings, the capsule had been set spinning like a top, which produced a more stable configuration as it went through the turbulence of entry. Curiosity would be despun and was to fly through the atmosphere with small jets at the top to help steer it. What if the searing gases dug a small pocket in the shield? That pocket would grow deeper, possibly breaching the shield and then burning away at the thin underbelly of the rover. It was a scenario not unlike that of the Columbia disaster, in which the damage had started from a banged-up thermal tile under the wing.
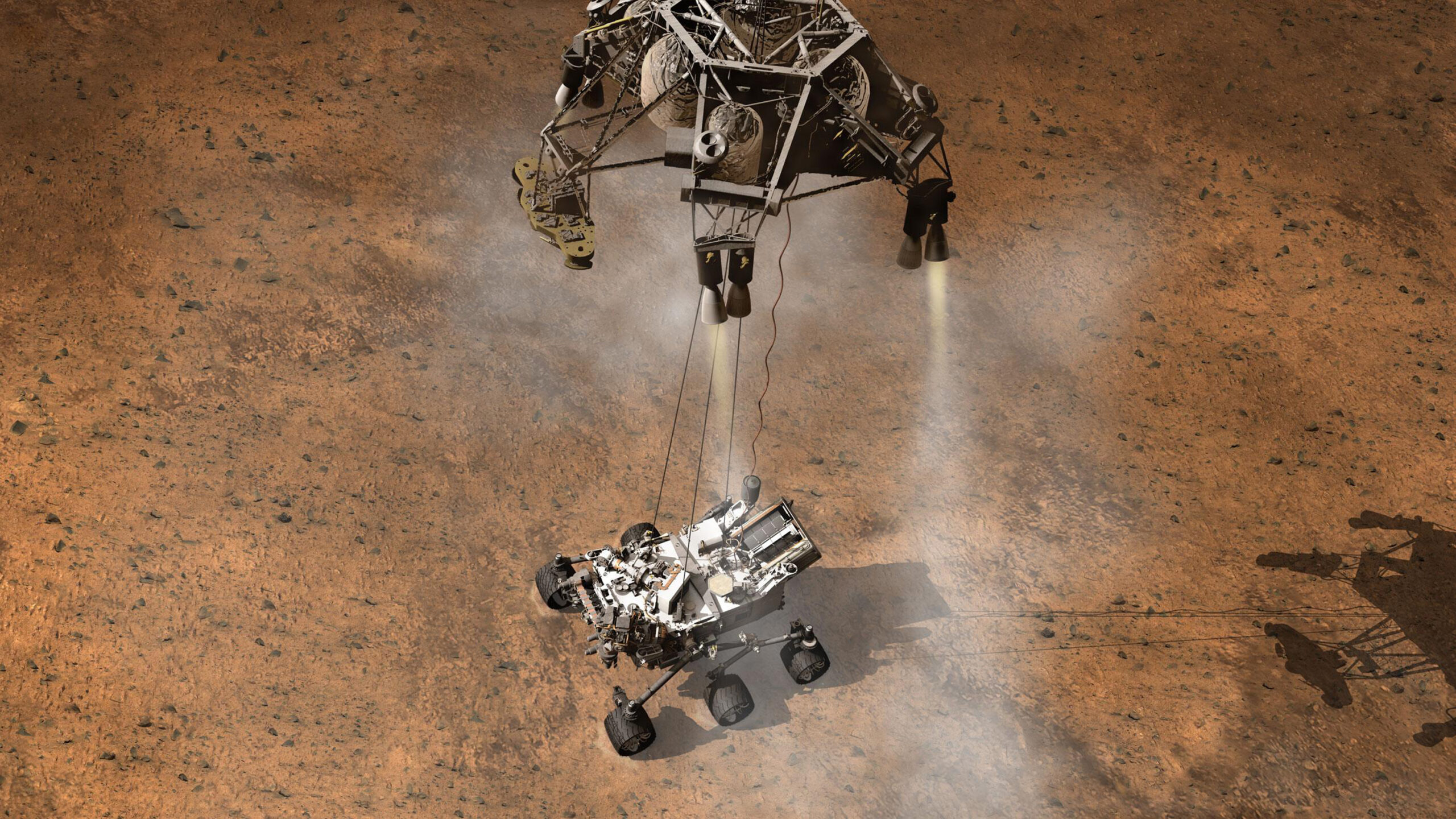
Next on my list: the parachute could shred. NASA had to use bigger and bigger chutes for the Mars missions, and this was the biggest ever. It would open at supersonic speeds, which is mechanically challenging. I had seen a video of a Curiosity parachute being shredded in a test. Would the improvements made after that test be sufficient? Next, after the parachute was open, the capsule would have to open up and jettison the rover. If it didn’t, the whole contraption would hit the ground almost at the same speed as Genesis. Then there was the retro-rocket package—the “Sky Crane”: What if it became unstable, turned over, and powered itself into the ground? Even more risky was the point at which the Sky Crane was supposed to hover. What if the radar didn’t detect the ground properly, and both rover and Sky Crane whacked the surface together? The rover would never be able to move with that huge beast on its back. The mast would never be raised, and ChemCam would never be usable.
Mostly, my imagination went wild with the cables that were to winch the rover down to the ground. This was supposed to happen when the vehicle was about 60 feet in the air. I could imagine Curiosity swinging wildly back and forth, and the whole thing crashing to the surface. Then there were the wheels. They wouldn’t actually deploy until the rover was being winched down the last few feet. If they didn’t snap all the way into position, we would have a stupid-looking six-wheeled lander that would never go anywhere. Lastly, what if the cables lowering the rover were not successfully cut once Curiosity was on the ground? It would get dragged, probably ending upside down. Even if the rover was right-side up, it would have the Sky Crane fettering it like a ball and chain! And the worst of it was, there were probably a thousand other details that I didn’t even know about that could thwart the mission.
The idea that the whole series of events would come off perfectly seemed rather improbable. In all, seventy-six pyrotechnic devices, mostly bolt or cable cutters, would have to do their job flawlessly. I tried not to think about it much. Life would go on, one way or another.
* * *
The operations rehearsals were cathartic for me. These operational readiness tests, or ORTs, were held at JPL beginning three months after launch. They gave the Curiosity team an opportunity to learn everything from how to get the data from the instruments to how to drive the rover and plan each day’s activities. They also covered the landing itself, the commissioning phase for the instruments, use of the rover arm, and other rover activities.
Curiosity was an incredibly complicated machine, and we would have to program all of its activities for a full eight hours of operation every day. Optimizing a robot to do everything on its own, from driving to zapping rocks, was a huge feat. JPL had built a single program called Mars Science Laboratory InterfaCE (MSLICE, pronounced “M-slice”) to plan all of the rover’s activities. For our ChemCam instrument, for example, MSLICE would figure out when we would have to turn on the unit’s heaters and coolers before conducting an analysis. Once a rock was selected, it would determine its position and distance, giving us coordinates so we could shoot at it with the laser. We would also tell it the downlink priority for getting the data back to Earth, and whether to process the data on board or send us raw data. The same MSLICE program would be used to plan the rover drives, the use of all the other instruments, and the motions of the arm.
Operating Curiosity day to day would be a complicated procedure. It would consist of many people working both independently and together to determine what the rover would do each day. Individuals would program their own parts of the day’s activities, then meet with others to formulate a plan that would bring all of these fragments together into a single, coherent master sequence for the day. Lots of juggling would be necessary so that everyone would be able to gather the data they needed. Dozens of people would be involved in the whole process.
The day would start with analyzing the previous day’s data. In particular, each of the people responsible for analyzing the downlinked data would need to ensure that all of the processes had gone well the previous sol and that no anomalies had occurred. Then, in a science assessment meeting, each subsystem downlink lead would report on the health of his or her instrument or system and discuss any interesting new results. Then the long-term planner and the operations lead would assign several groups to build skeleton tasks for the instruments, the mobility system, or the arm for the next sol.
Depending on the specific activity, the groups would select rocks to image or analyze, choose a location to deploy the arm to, or decide where to drive. They would spend a couple of hours working on these plans. Around the middle of the shift, they would deliver the plan fragments, and then a meeting would be held to discuss these and see whether all of the planned activities fit within the power, time, and data- volume constraints. If all of the activities combined took more time than the rover had in the day, or if they took too much power, something would be scrubbed from the plan. Data volume is only critical if confirmation of certain details must be obtained prior to the next sol’s plan, or if the data buffer on the rover ends up too full. Once the plan met the time, power, and data requirements, the fragments would be handed over to a new group of people who would turn the plans into rover command sequences. The sequences would be reviewed in yet another meeting at the end of the long day, this time by people on the second shift, and then the commands would finally be radiated up to Mars.
Each instrument team had downlink leads (people who knew how to retrieve and interpret the new data), uplink leads (those in charge of getting the activities and sequences up to the rover), instrument experts, and scientists. Often, the scientists shadowed the engineers to make sure the science goals were being met. They might, for example, check to make sure the particular rock they wanted to analyze was prioritized.
ChemCam’s whole team now consisted of roughly fifty people, counting scientists and engineers, and all of them needed to be trained. The ORTs were going to be a big deal. There were so many people to be trained that different groups would be scheduled for different ORTs.
The first ORT came in late February 2012. It was preceded by a week of “flight school,” pretraining sessions held over the phone and on computer screens, with the purpose of explaining the daily schedule, the meeting rooms, and the protocol. The February ORT covered the landing and the first several days of the instrument commissioning phase and took place over nine days.
Arriving at JPL at 6:30 a.m. on the morning of the first ORT, I could see the excitement on everyone’s faces. I had not expected this— it was only a practice. The whole team pulled together to give it their very best shot. We imagined that the rover had landed and we were getting the very first stream of data from the Red Planet. The team was mesmerized. Sylvestre and I found that we had to coax people to leave when their shift was over. Many individuals were getting tired as the week wore on, and yet they didn’t want to miss a single minute of the event. I started to realize that human excitement and curiosity were go- ing to be powerful factors in the team dynamic when Curiosity really got to Mars. I had better start planning to work with it.
By day seven, we had tried out the ChemCam laser “on Mars.” Not everything had worked perfectly, but we got useful data. It was a satisfying feeling. Near the end of the nine days, as people started to trickle back to their home institutions, we handed out certificates and took a group picture. Everyone had had their first experience operating Curiosity.
Most of the Los Alamos team members had attended the first ORT, but not being able to use everyone on this first training session, we had left one person, Sam Clegg, behind, assuring him he would be a priority on the next ORT. True to our word, we gave Sam the role of downlink lead on the next ORT, and he took on his role with gusto. He had attended every minute of flight school, read the procedures backward and forward, and made sure the software worked on his laptop before he arrived at JPL. The first day that he had the lead role, he came in looking intense. The data arrived in the repository and he was off to the race, working on transferring the data to his computer and going through the processing steps—subtract the background from the spectrum, filter out the noise, and complete a wavelength calibration.
Partway through the activity, I went over to see how he was doing. He looked dead serious, apparently not noticing my presence. His brow was furrowed and he was working his jaw slightly. His mouth was a straight line. I was worried that he was upset about something. Part of my job as instrument leader was to make sure that morale was high, and seeing Sam in this condition made me slightly worried. Then he noticed I was watching him. He looked at me and every muscle on his face loosened into a big smile. “I’m really having fun doing this, Roger,” he beamed. After that, I didn’t worry about Sam. He was just being intense. Sam, as expected, became our best downlink lead.
The third ORT was completely different from the rest. A team of JPL gremlins was supposed to inject as many faults as they could during the landing sequence to see how the team would react and to test our judgment and skill at off-nominal cases. We were told that we might not get to do much with the instruments, as the focus would be on making sure the spacecraft survived. So we didn’t attend this test in person.
Three days before the ORT was to begin I received an e-mail marked urgent stating that there was a problem with the spacecraft. The message startled me at first, but then I realized that the ORT had begun and this was the first message of the exercise. According to the message, the spacecraft appeared to be accelerating slightly, and the reason was unknown. With the landing supposedly scheduled in about three days, this was very serious. The engineers calculated that the acceleration, equiva-ent in force to the weight of a tissue on one’s hand, would, over the course of the three days, push the spacecraft 9 kilometers off target, right at the edge of its ability to correct and make it into the landing ellipse.
Over the next few hours, the navigation team determined that the likely cause was a small meteorite hit to a propellant line. The hit had resulted in a pinhole stream of propellant being released, which caused the spacecraft to accelerate ever so slightly. A short time later, we received another message: contact with the spacecraft had been lost briefly, and when it was restored, Curiosity had switched to its backup computer. Things were very wrong—my worst fears were being realized, at least in rehearsal!
We braced ourselves for the landing. Deep down we knew that the craft had to land at least somewhat successfully, because we had the rest of the rehearsal to do. The night of the landing came. Curiosity came wobbling into the Red Planet. The Doppler tone, a continuous radio signal telling us that the craft was alive and giving its speed, was heard all the way down—indicating success. Because Earth would be below the horizon when the real Curiosity landed, the first data would be relayed by a Mars satellite, Odyssey, passing overhead. But when Odyssey was supposed to deliver data to Earth, there was nothing! The second pass, just a couple of hours later, did return some data, but it was only about half of what we were supposed to get. Finally, eight hours later, another satellite pass retrieved our first images, but one of the cameras didn’t seem to be working. The other camera showed much more of the sky than it should have—which meant the rover was resting at a steep angle. There was another way to see where the rover had supposedly
landed. The Mars Reconnaissance Orbiter had a camera of spy-satellite caliber. This camera had actually snapped a picture of the Phoenix lander parachuting to the surface of Mars in 2008. It was going to do the same for Curiosity. However, the image that was supposedly downloaded from the HiRISE, High Resolution Imaging Science Experiment, camera showed the rover parachuting toward a deep crater. The preliminary indication was that the rover was well below the flat plains of Mars. The satellites couldn’t communicate with it except if they were almost directly overhead, where they still had a line of sight to the dug-in rover.
A few other anomalies occurred over the next couple of days, but overall, the team started to get things back to normal. The slope was not so steep so as to imperil the rover, and the instruments were brought to life one by one.
The rehearsal reminded us that we should not expect the operations to be routine. We had a sequence of activities all planned for the first few days after the landing, and we had all the right people scheduled for those days. We now realized that our most important assets might be flexibility and readiness for any challenge.
The ORT also reminded me that there were many other things that could go wrong that I had not even imagined, many of which could end the whole mission. But I would have to battle my fears.
Excerpted with permission from “Red Rover: Inside the Story of Robotic Space Exploration from Genesis to the Mars Rover Curiosity,” by Roger Wiens. Available from Basic Books, a member of The Perseus Books Group. Copyright © 2013.
